Drive Train
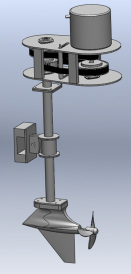
This years designers choose to use a compound drive train in order to reduce the weight of the boat, keep the design compact, and minimize the amount of moving parts. Last years team considered this type of design but in the end decided to go with interchangeable drive trains for sprint and endurance. This is the design currently being worked on in SolidWorks and will incorporate an interchangeable belt for different races.
Hull
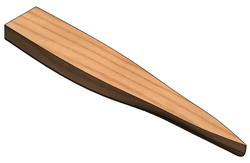
Last year's team decided to reuse the 2009 hull, placing 4th overall. For the 2013 competition, we decided that a major redesign of the hull would be required to place in the top three. Early attempts at designing a new hull using PTC Creo and SolidWorks proved time consuming. Adding additional time for analyzing a model in ANSYS fluent, there is a significant time investment just to create and analyze a single design. We have switched over to Rhinoceros, a different CAD software package along with the Orca 3D plug-in for hull design. The Orca plug-in has a ship-building assistant feature which allows for the rapid design of hull. It even has built in hydrostatic and dynamic analysis. Using this software, the goal is to have the hull designed by the end of the fall semester, so that construction can begin over winter break. The design of the hull has been finalized and is a radically new reversible catamaran optimized for efficiency and speed.
Propeller

Instead of using a commercially available propellers, they will be designed and modified specifically for the two main events of the competition (endurance and sprint.) Last year's team was successful in designing and fabricating an efficient propeller for the endurance competition. This propeller will be reused and the main focus is being put on the sprint propeller this year.
A surface piercing propeller has been the main area of focus as far as understanding flow dynamics and design characteristics are concerned. No open source or readily available software exists to design custom surface piercing propellers.
Surface drive idea has taken a backseat for now and OpenProp 2.4.6, a MATLAB program created by folks at M.I.T., Maine Maritime Academy, is being used to design a conventional propeller. Once the design is finalized, stress and cavitation analyses will immediately follow to test the propeller under high speed, high loading conditions simulating the operating condition at 35 knots.
A surface piercing propeller has been the main area of focus as far as understanding flow dynamics and design characteristics are concerned. No open source or readily available software exists to design custom surface piercing propellers.
Surface drive idea has taken a backseat for now and OpenProp 2.4.6, a MATLAB program created by folks at M.I.T., Maine Maritime Academy, is being used to design a conventional propeller. Once the design is finalized, stress and cavitation analyses will immediately follow to test the propeller under high speed, high loading conditions simulating the operating condition at 35 knots.
Electrical

Solar panels and lead-acid batteries are the main components powering the electrical
systems. The endurance event utilizes two commercial solar panels to charge
a 24V system powering a motor through an appropriate controller. The sprint
configuration is solely powered by a 36V battery array and will include a DC/DC
boost converter to maximize the power the motor can receive.
systems. The endurance event utilizes two commercial solar panels to charge
a 24V system powering a motor through an appropriate controller. The sprint
configuration is solely powered by a 36V battery array and will include a DC/DC
boost converter to maximize the power the motor can receive.
Telemetry

The telemetry system will provide real-time data collection for on-shore analysis
along with on-board displays showing important information to the skipper. At the heart of the
system is an Arduino microcontroller, being used to read various sensors and
transmit data through a wireless transceiver. An on-shore computer will analyze
data through the use of LabVIEW and MATLAB to compute the optimal power to
distribute to the motor for maximum efficiency.
along with on-board displays showing important information to the skipper. At the heart of the
system is an Arduino microcontroller, being used to read various sensors and
transmit data through a wireless transceiver. An on-shore computer will analyze
data through the use of LabVIEW and MATLAB to compute the optimal power to
distribute to the motor for maximum efficiency.
